🎉 Up to 70% Off Selected ItemsShop Sale
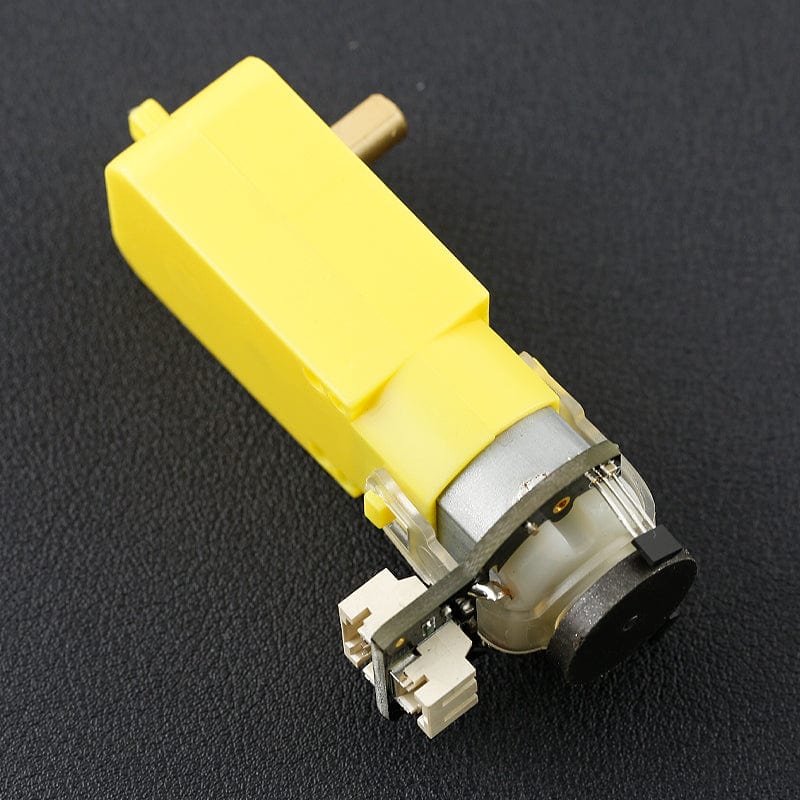


TT Motor with Encoder (6V 160RPM 120:1)
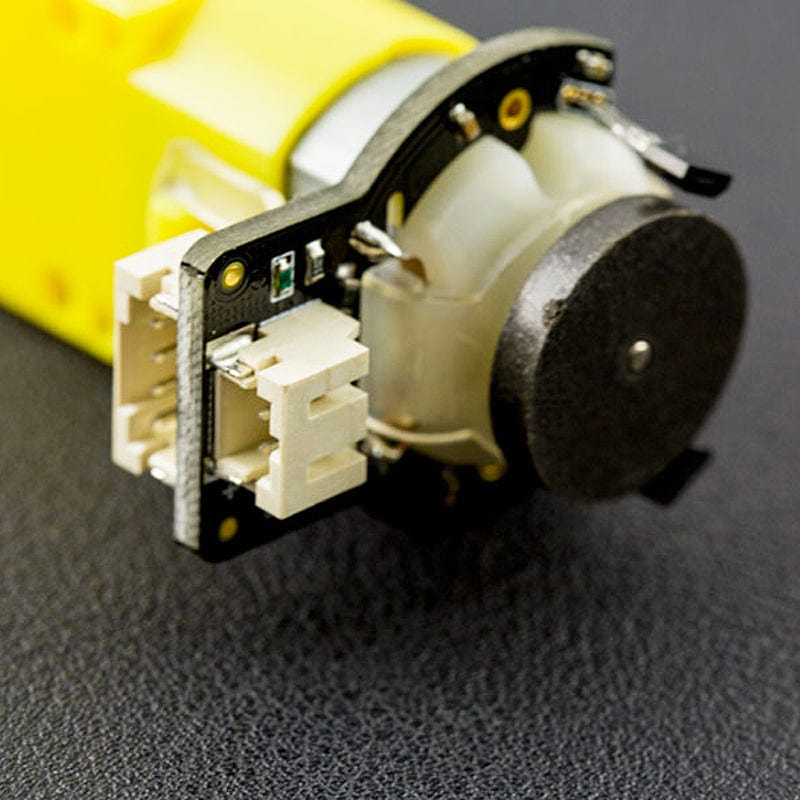
This is the DFRobot TT Micro DC geared motor with encoder. It is a motor with a 120:1 gearbox and an integrated quadrature encoder that provides a resolution of 8 pulses single per round giving a maximum output of 1920 within one round.
With an Arduino controller and motor driver, applications for this include a closed-loop PID control or PWM motor speed control. This motor is an ideal option for mobile robot projects. The copper output shaft, embedded thread and reinforced connector greatly extends the motor's service life.
The encoder interface is compatible with DFRobot's Gravity interface.
The encoder interface is compatible with DFRobot's Gravity interface.
Connection Example - DFRduino UNO R3

Specifications
- Gear ratio: 120:1
- No-load speed @ 6V: 160 rpm
- No-load speed @ 3V: 60 rpm
- No-load current @ 6V: 0.17A
- No-load current @ 3V: 0.14A
- Max Stall current: 2.8A
- Max Stall torque: 0.8kgf.cm
- Rated torque: 0.2kgf.cm
- Encoder operating voltage: 4.5~7.5V
- Motor operating voltage: 3~7.5V (Rated voltage 6V)
- Operating ambient temperature: -10~+60°C
- Weight: 50g
Resources
- Product Wiki
- Motor Dimension Drawing
- SolidWorks File
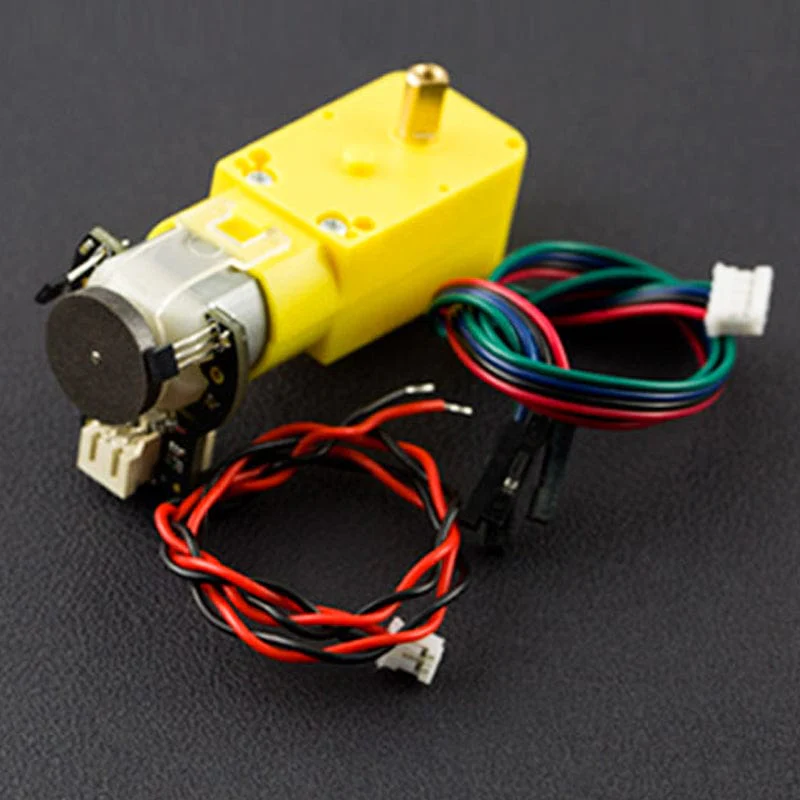
Package Contents
- 1x Micro DC Motor with Encoder-SJ01
- 1x JST 2-Pin motor cable
- 1x JST 4-Pin encoder cable
$9.80
TT Motor with Encoder (6V 160RPM 120:1)—
$9.80
Product Information
Product Information
Shipping & Returns
Shipping & Returns
Description
This is the DFRobot TT Micro DC geared motor with encoder. It is a motor with a 120:1 gearbox and an integrated quadrature encoder that provides a resolution of 8 pulses single per round giving a maximum output of 1920 within one round.
With an Arduino controller and motor driver, applications for this include a closed-loop PID control or PWM motor speed control. This motor is an ideal option for mobile robot projects. The copper output shaft, embedded thread and reinforced connector greatly extends the motor's service life.
The encoder interface is compatible with DFRobot's Gravity interface.
The encoder interface is compatible with DFRobot's Gravity interface.
Connection Example - DFRduino UNO R3
Specifications
- Gear ratio: 120:1
- No-load speed @ 6V: 160 rpm
- No-load speed @ 3V: 60 rpm
- No-load current @ 6V: 0.17A
- No-load current @ 3V: 0.14A
- Max Stall current: 2.8A
- Max Stall torque: 0.8kgf.cm
- Rated torque: 0.2kgf.cm
- Encoder operating voltage: 4.5~7.5V
- Motor operating voltage: 3~7.5V (Rated voltage 6V)
- Operating ambient temperature: -10~+60°C
- Weight: 50g
Resources
- Product Wiki
- Motor Dimension Drawing
- SolidWorks File
Package Contents
- 1x Micro DC Motor with Encoder-SJ01
- 1x JST 2-Pin motor cable
- 1x JST 4-Pin encoder cable